

VERWANDT
Kontakt
0086-411-84619565
E-mail:sales.de@good-display.com
Adresse:Nr. 18 Zhonghua West Road, Bezirk Ganjingzi, Stadt Dalian, Provinz Liaoning
RFID begrüßt wieder neue Möglichkeiten, und in Zukunft ist eine hochpräzise Ortung in Innenräumen zu erwarten!
- Kategorie:Pressezentrum
- Autor:
- Quelle:
- Angabezeit:2022-08-31
- Aufrufmenge:0
Quelle
RFID begrüßt wieder neue Möglichkeiten, und in Zukunft ist eine hochpräzise Ortung in Innenräumen zu erwarten!
Quelle
- Kategorie:Pressezentrum
- Autor:
- Quelle:
- Angabezeit:2022-08-31
- Aufrufmenge:0
RFID begrüßt wieder neue Möglichkeiten, und in Zukunft ist eine hochpräzise Ortung in Innenräumen zu erwarten!
Im Jahr 2017 brachte CribMaster, eine Tochtergesellschaft des professionellen Werkzeugherstellers Stanley Black & Decker, den „genauesten intelligenten Werkzeugschrank der Welt“ mit integrierter Bestands- und Werkzeugverfolgung auf den Markt und nutzte die Technologie des Anbieters von Tracking-Lösungen PervasID. Basierend auf dem von PervasID bereitgestellten RFID-Lesegerät kann jedes Werkzeug (bis zu 500) mit passiven RFID-Tags im intelligenten Werkzeugschrank innerhalb von Sekunden verfolgt werden.
Für die Luftfahrtindustrie verursachen Fremdkörpertrümmer (FOD) schätzungsweise jährliche direkte und indirekte Kosten von 13 Milliarden US-Dollar, einschließlich Flugverspätungen, Flugzeugersatz und Treibstoffineffizienz. Daher ist es wichtig, jedes Werkzeug im Auge zu behalten, und diese Lösung reduziert die Anzahl der Probleme in der Luftfahrtindustrie erheblich, indem sie eine Echtzeitgenauigkeit von bis zu 99,9 % bietet und sicherstellt, dass sich die Werkzeuge im Schrank und nicht im Flugzeug befinden durch Fremdkörper verursacht. Derzeit hat einer der größten Flugzeughersteller Nordamerikas das Programm in Hunderten von Flugzeugen eingesetzt.
Neben der Anwendung in der Luftfahrtindustrie glänzt RFID auch in vielen anderen Bereichen: Für Warehousing, das eng mit Fertigung, Handel und Logistik verbunden ist, wird der Einsatz von RFID-Technologie und Produkten zur Automatisierung von Bestandsverfolgung, Bestands- und Asset-Management hat einen revolutionären subversiven Effekt auf die Branche und realisiert dann das digitale Management und die intelligente Aufrüstung traditioneller Fabriken und Lagerhäuser.
RFID macht die Lagerumgebung nicht mehr tot
QR-Codes und Barcodes befinden sich im aktuellen Lagerszenario meist auf den Paketen von Expresslieferungen oder Waren.Die Prämisse der Positionierung und Bahnplanung von Waren ist die genaue Identifizierung dieser Codes. Gegenwärtig ist das am weitesten verbreitete Identifizierungsverfahren in der Industrie immer noch eine aktive Ausrüstung oder ein optisches System, aber es gibt Probleme mit hohen Kosten und regelmäßiger Wartung. Besonders für das Vision-System besteht der größte Nachteil darin, dass bei einer Okklusion oder mehreren gestapelten Artikeln oder einer Verschmutzung oder Beschädigung des Etiketts die Erkennung der Kamera stark eingeschränkt ist, wie z "Schwarzlichtfabrik", in Abwesenheit von Licht oder düsteren Bedingungen wird die Stabilität der Kamera stark in Frage gestellt.
Werden hingegen passive RFID-Tags verwendet, lässt sich diese Situation weitestgehend vermeiden. Normalerweise besteht das RFID-System aus drei Teilen: einem Lesegerät, einem elektronischen Etikett und einem Datenverwaltungssystem.Für das RFID-Etikett hat es nicht nur eine gewisse Durchdringung, sondern auch die wasserdichte, antimagnetische, hochtemperaturbeständige Verwendung Es hat die Vorteile einer langen Lebensdauer, einer langen Lesereichweite, verschlüsselter Tag-Daten, einer großen Speicherkapazität, einer freien Speicherung von Informationen usw. und wird nicht durch Licht eingeschränkt. Gleichzeitig ist der größte Vorteil passiver RFID-Tags, dass sie sehr günstig und wartungsfrei sind und in diesem Fall dennoch eine relativ hochgenaue Positionierung erreichen können. Daher können passive RFID-Tags nicht nur im Lagerumfeld, sondern in Zukunft auch in anderen Szenarien weit verbreitet sein.
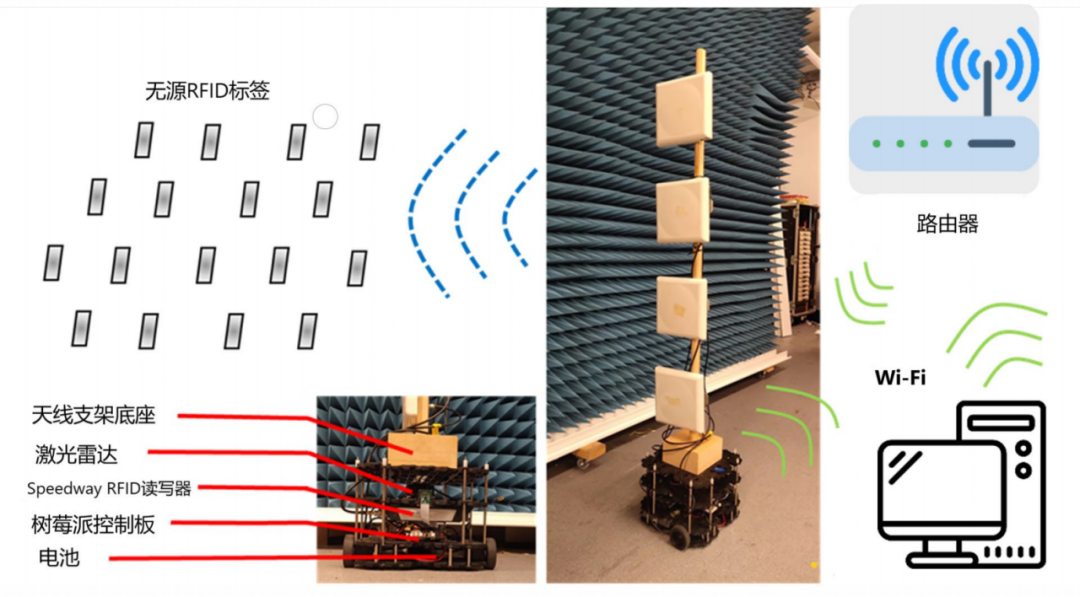
Laut Liu Zheng, einem Doktoranden an der University of Cambridge, besteht die Hauptforschungsrichtung ihres Teams darin, passives RFID in Kombination mit Robotern für die hochpräzise Positionsbestimmung in Innenräumen einzusetzen. In der Laborumgebung simulierten die Teammitglieder die Lagerumgebung, und wenn man bedenkt, dass die tatsächliche Lagerumgebung normalerweise größer ist, ist die Anzahl der erforderlichen Antennen sehr groß, wenn die herkömmliche Methode zum Anordnen fester Antennen verwendet wird, was zu erhöhten Kosten und Kosten führt Verkabelung Es wird auch sehr mühsam sein. Daher leistete das Team Pionierarbeit bei der Entwicklung einer mobilen Roboterplattform, die mit RFID-bezogenen Geräten ausgestattet werden kann, um Informationen zu sammeln, indem sie ständig in der Lagerumgebung patrouillieren.
Wie aus der obigen Abbildung ersichtlich, ist die Unterseite der mobilen Roboterplattform mit einer Batterie ausgestattet, die das gesamte Gerät mit Strom versorgen kann.Auf der Batterie ist eine Raspberry Pi-Steuerplatine installiert, die das mobile Chassis steuern kann, die Auto, das entsprechende Lesegerät und die Antenne. Auf der Oberseite des Raspberry Pi befindet sich neben der Ausstattung ein Lesegerät zum Auslesen von passiven RFID-Tag-Informationen. Darüber hinaus verfügt das Auto selbst über einige Sensoren, wie z kann einige Abstandsinformationen zwischen dem Auto und der Umgebung messen.
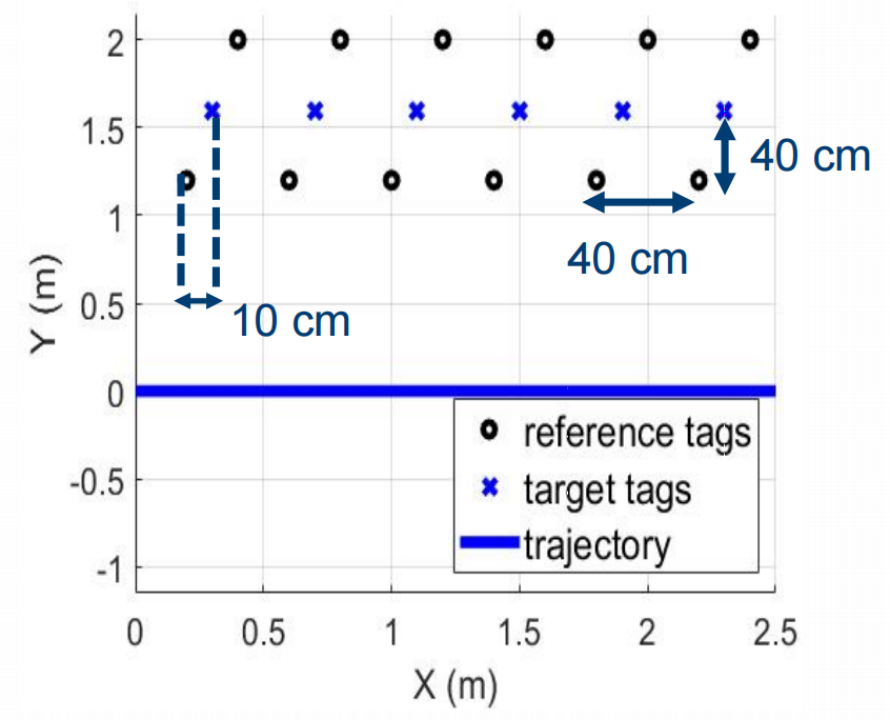
Auf der Oberseite der mobilen Roboterplattform installierten die Teammitglieder dafür HF-Antennen, die bis zu vier unterstützen können. Im simulierten Lagerraum platzierte das Team eine Reihe von passiven RFID-Tags an verschiedenen Stellen, von denen einige als öffentliche Referenz-Tags verwendet werden konnten, während andere als Ziel-Tags an den zu verfolgenden Artikeln angebracht werden konnten. Darüber hinaus kann die Plattform auch mit dem lokalen Netzwerk verbunden werden, sodass die mobile Roboterplattform über das Netzwerk ferngesteuert werden kann.
Nach der Entwicklung dieser mobilen Roboterplattform entwickelte das Team auch neue Positionierungsalgorithmen für verschiedene Szenarien basierend auf der Plattform, wie z. B.: ISAR-SAR-Positionierungsalgorithmus, k-Wert-basierter Positionierungsalgorithmus, auf geometrischen Beziehungen basierender Positionierungsalgorithmus, GNN-basierte Positionierung Algorithmus Der Algorithmus des Modells usw., um eine hochpräzise Positionierung und Verfolgung des Ziels zu erreichen.
Mehrere Algorithmen helfen bei der hochpräzisen Positionierung
Bei der hochpräzisen Positionierung gibt es zwei Probleme, die dringend gelöst werden müssen. Erstens ist die Position der mobilen Roboterplattform selbst klar zu kennen, nur so kann die Wegplanung und Entscheidungsfindung erfolgen, was auch die zentrale Investitionsrichtung vieler Unicorn-Unternehmen ist, zweitens die Position des Labels ebenfalls sehr wichtig: Trajektorien, um die Position von Etiketten vorherzusagen. Die vier von Dr. Liu Zheng geteilten Positionierungsalgorithmen haben bei der Lösung dieser beiden Probleme Durchbrüche erzielt:
ISAR-SAR-Positionierungsalgorithmus
Der Algorithmus verwendet kostengünstige passive RFID-Tags, um die Flugbahn der mobilen Plattform zu berechnen, verwendet dann die Referenz-Tags in der Umgebung, um den Übereinstimmungsgrad der Flugbahn zu messen, und verwendet schließlich die geschätzte Flugbahn, um das Ziel-Tag zu lokalisieren. Der Kern dieses Algorithmus ist der SAR-Algorithmus (Synthetic Aperture Radar), der das Ziel-Tag während der Bewegung entlang der bekannten Trajektorie der mobilen Plattform kontinuierlich lesen und schreiben kann, um eine Reihe von Informationen wie Phase zu erhalten Berechnet eine Wahrscheinlichkeits-Heatmap für das Ziellabel an einer bestimmten Stelle im Raum. Durch den SAR-Algorithmus kann eine relativ hohe Positionierungsgenauigkeit erhalten werden, aber der Nachteil besteht darin, dass die Trajektorie der mobilen Plattform gemessen werden muss, und diese Trajektorien normalerweise einige zusätzliche Ausrüstung erfordern oder den SLAM-Algorithmus verwenden, um sie zu erhalten.
Als Reaktion auf diesen Mangel des SAR-Algorithmus schlug das Team auch den ISAR-Algorithmus (Inverse Synthetic Aperture Radar) vor, der die Wahrscheinlichkeit berechnet, dass die mobile Plattform im nächsten Moment an jeder Position erscheint, indem passive Referenz-Tags mit bekannten Positionen gelegt werden weist der geschätzten Position die maximale Wahrscheinlichkeit zu. Der Wert wird auf die geschätzte Position gesetzt, und durch Wiederholen dieser Schritte wird ein vollständiger geschätzter Pfad erhalten. Wenn dieser geschätzte Pfad erhalten ist, kann die geschätzte Trajektorie auch unter Verwendung des Referenzlabels bewertet werden, und der ISAR-SAR-Schleifenalgorithmus verwendet werden, um weiter zu optimieren, und der optimale Pfad kann erhalten werden, indem die Parameter des Algorithmus kontinuierlich angepasst werden , um das Ziel einzustellen.Das Etikett wird positioniert, um den Positionierungsfehler weiter zu reduzieren.
Ein auf dem k-Wert basierender Lokalisierungsalgorithmus
Wenn die mobile Plattform während der Vorwärtsbewegung das Tag passiert, weist die Phase normalerweise eine Art periodischer Änderung auf, die auch verwendet werden kann, um die Position zu bestimmen, indem die Phase ausgepackt und die Kurve angepasst wird. Nach Erhalt der Phasen- und RSSI-Informationen kann die Stärke des empfangenen RSSI verwendet werden, um zu messen, ob das empfangene Signal stabil ist oder nicht, um einen effektiven Datensatz zu erhalten. Nach Erhalt eines gültigen Datensatzes kann die Position des Ziellabels parallel zur Trajektorie berechnet werden, indem der stationäre Punkt der Phasenkurve analysiert und mit der Position des mobilen Roboters kombiniert wird. Die Position senkrecht zur Trajektorie kann durch Einstellen des k-Parameters erhalten werden. Der k-Wert-basierte Positionierungsalgorithmus benötigt im Vergleich zum vorherigen Algorithmus weniger Rechenleistung und benötigt weniger Zeit, um die Position des Zieletiketts zu lokalisieren, und kann auch auf den dreidimensionalen Raum erweitert werden, um Höheninformationen zu bestimmen. Diese Methode kann den Standortbereich des Zieletiketts schnell bestimmen und dann die genaue Position des Etiketts verfeinern.
Geometriebasierte Positionierungsmethode
Der Vorteil dieses Verfahrens besteht darin, dass keine genaue Messung der Trajektorie erforderlich ist und die Lokalisierung der Zielmarkierung mit nur einer sehr geringen Anzahl von Referenzmarkierungen erreicht werden kann. Da sich die mobile Roboterplattform im Allgemeinen mit einer konstanten Geschwindigkeit bewegt, kann die Richtung der Trajektorie ungefähr erhalten werden, indem die Plattform zu unterschiedlichen Zeiten aus den Positionen und Winkeln verschiedener Etiketten bewegt wird.Durch die Richtung der Trajektorie und Analysieren der Beziehung zwischen den Trajektorie, die Referenzkennzeichnung und die Zielkennzeichnung. Die räumliche geometrische Beziehung zwischen ihnen kann verwendet werden, um die Position der Zielkennzeichnung zu erhalten. Dieses Verfahren reduziert weiter die Abhängigkeit des Systems von der Dichte von Referenzetiketten, reduziert den Analysedruck von Hilfsgerätdaten, reduziert Rechenkosten und Energieverbrauch und verkürzt die Positionierungszeit.
GNN-Lokalisierungsalgorithmus
Beim Vorwärtsbewegen der mobilen Roboterplattform kann jeder Abtastpunkt als Knoten betrachtet werden, der Informationen wie Phase, RSSI und Roboterposition enthält. Verschiedene benachbarte Knoten können gemäß der Reihenfolge der Plattformbewegung zu Kanten verbunden werden, und dann kann eine Graphstruktur konstruiert und dann zum Training in das neuronale Graphnetz eingefügt werden, und das Vorhersageergebnis der Zieletikettenposition kann durch erhalten werden das Model.
RFID hat eine glänzende Zukunft
Laut Dr. Fu Zhe gibt es derzeit mehr als 8 RFID-Universitätsteams auf der ganzen Welt, die an verwandten Produkten arbeiten, und die Zahl der inländischen Unternehmensteams nimmt allmählich zu. Die Unterschiede zwischen den verschiedenen Teams liegen hauptsächlich in den von ihnen entwickelten mobilen Plattformen und RFID sie verwenden.Systeme sind nicht dasselbe.
Natürlich hat RFID im Lagerszenario, obwohl es mehr Vorteile als die visuelle Lösung hat, auch seine eigenen Mängel: Wenn beispielsweise die Dichte der Artikel im Raum auf ein bestimmtes Niveau steigt, wird auch der Einsatz von RFID-Identifikation auftreten Engpässe. Aufgrund der Begrenzung der Hardware-Leserate sinkt die Anzahl der Abtastraten pro Tag mit zunehmender Anzahl der Tags. Gleichzeitig führt die Erhöhung der Bewegungsgeschwindigkeit des Roboters auch zu einer Verringerung der effektiv gesammelten Informationen, und die Probleme der Mehrwege- und komplexen Umgebung sowie des Materials des Gegenstands selbst werden verringert Leistung der Systempositionierung. Darüber hinaus stellt auch der begrenzte Lese- und Schreibabstand ein dringend zu lösendes Problem dar. Daher stellt es auch einen Schmerzpunkt dar, mehrere RFID-Lesegeräte zur Abdeckung in einer Szene zu benötigen.Das Team von Fu Zhe löste auch das Problem, indem es die Lesegeräte neu gestaltete und verbesserte der Algorithmus Probleme wie Fernlesen und -schreiben.
Dr. Fu Zhe brachte auch seine eigenen Ideen ein, wie die Implementierung in Zukunft realisiert werden könnte. Er sagte, dass multifunktionale Perzeptionsfusionsroboter für den Innenbereich und medizinische Gesundheit der nächste Entwicklungstrend sein werden. Beispielsweise können die meisten aktuellen Kehrroboter nur die grundlegendsten Reinigungsarbeiten ausführen. Aus Kostengründen können sie nicht zu viele Funktionen hinzufügen. Kostengünstige RFID kann dieses Problem gerade lösen. Durch die Verwendung von passiven RFID-Tags kann eine breite Palette von Identifizierungsszenarien können ohne Verwendung von Batterien wie Bluetooth, Wi-Fi und UWB erstellt werden. Darüber hinaus kann RFID verwendet werden, um verschiedene Probleme wie aufgeblähte Ausrüstung und Privatsphäre des Personals zu lösen und effektive technische Lösungen für die Bereitstellung hocheffizienter und kostengünstiger qualitativ hochwertiger Dienstleistungen bereitzustellen.In Zukunft gibt es mehr Raum für Fantasie. Dr. Fu Zhes jüngster Einsatz von passivem RFID zur Erzielung von Fernerkundung, Körpererkennung, Augenverfolgung und anderen intelligenten IoT-Systemen für den Innenbereich bestätigt seine Ideen ständig.
QR-Code Scan erfolgt mit Handy
佳显电子
Kontakt
Produktanfrage : info@good-display.com
technischer Support : service@good-display.com
Beschwerdevorschlag : complaint@good-display.com






©2021-2024 DALIAN GOOD DISPLAY CO., LTD. All Rights Reserved. 辽ICP备08000578号-1 power by:300.cn Dalian